关于我 About Me
我的研究方向是车辆与交通工程,正在积极寻求新的机会。我热衷于推动AI与安全工程交叉领域的创新。 Expert in vehicle and transportation engineering, actively seeking new opportunities. I am passionate about driving innovation at the intersection of AI and safety engineering.
使用大语言模型构建AI演示以支持交通安全分析: Built AI demos using large language models to support traffic safety analysis: I. 部署本地LLM(基于Ollama)与API集成,构建用于碰撞报告分析的定制化AI应用,注重数据隐私。1. Deployed local LLMs (Ollama-based) with API integration to build customized AI applications for crash report analysis, with a focus on data privacy.
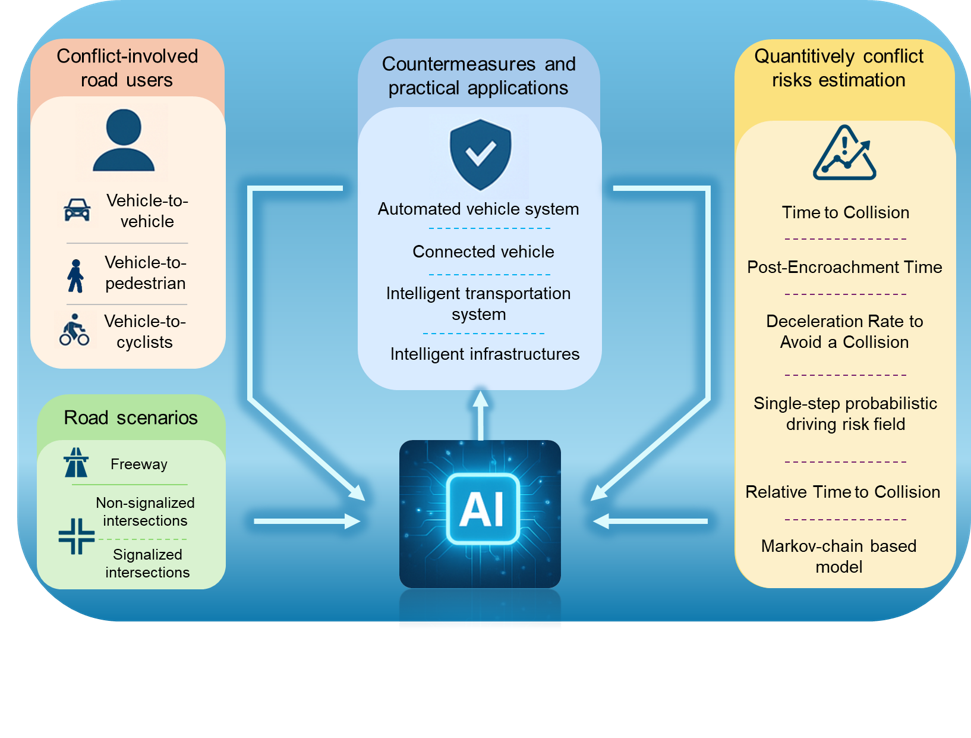
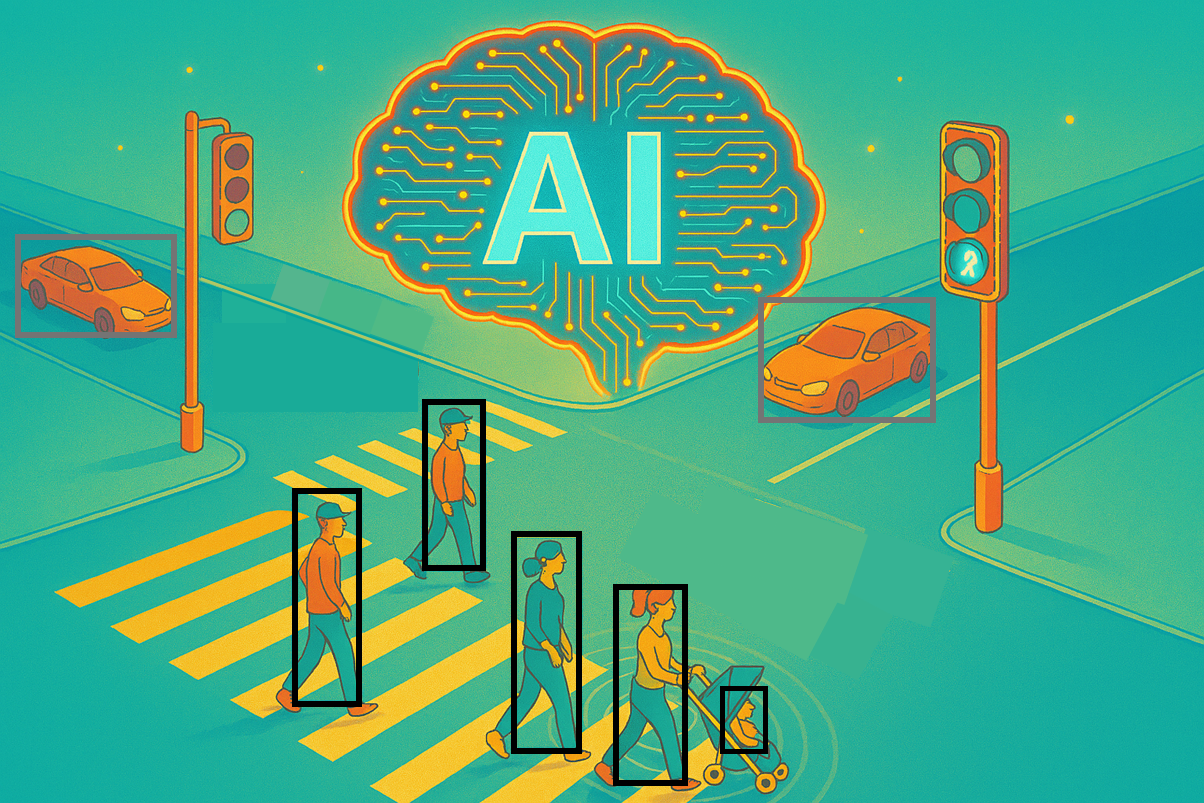
进行研发项目以使用先进模型测量和分类风险级别: Conduct Research & Development projects to measure and classify risk levels using advanced models: II. 领导设计使用基于Transformer模型的冲突风险评估框架,理解复杂交互信息;2. Led the design of a conflict risk assessment framework using Transformer-based models to understand complex interaction information; III. 开发用于冲突风险分类的全栈深度学习流程,为实时安全应用提供91%的准确率。3. Developed a full-stack deep learning pipeline for conflict risk classifications, delivering 91% accuracy for real-time safety applications.
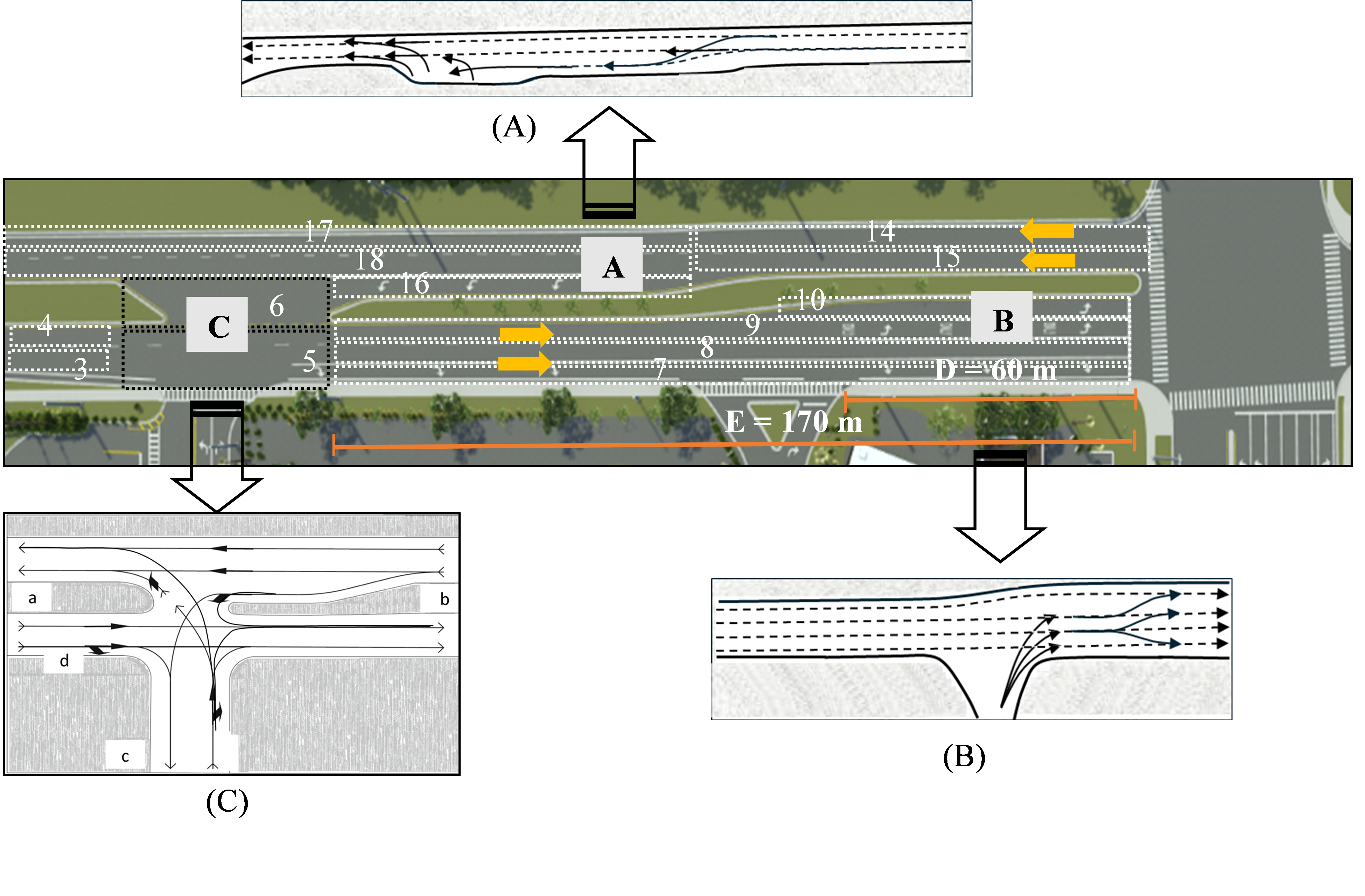
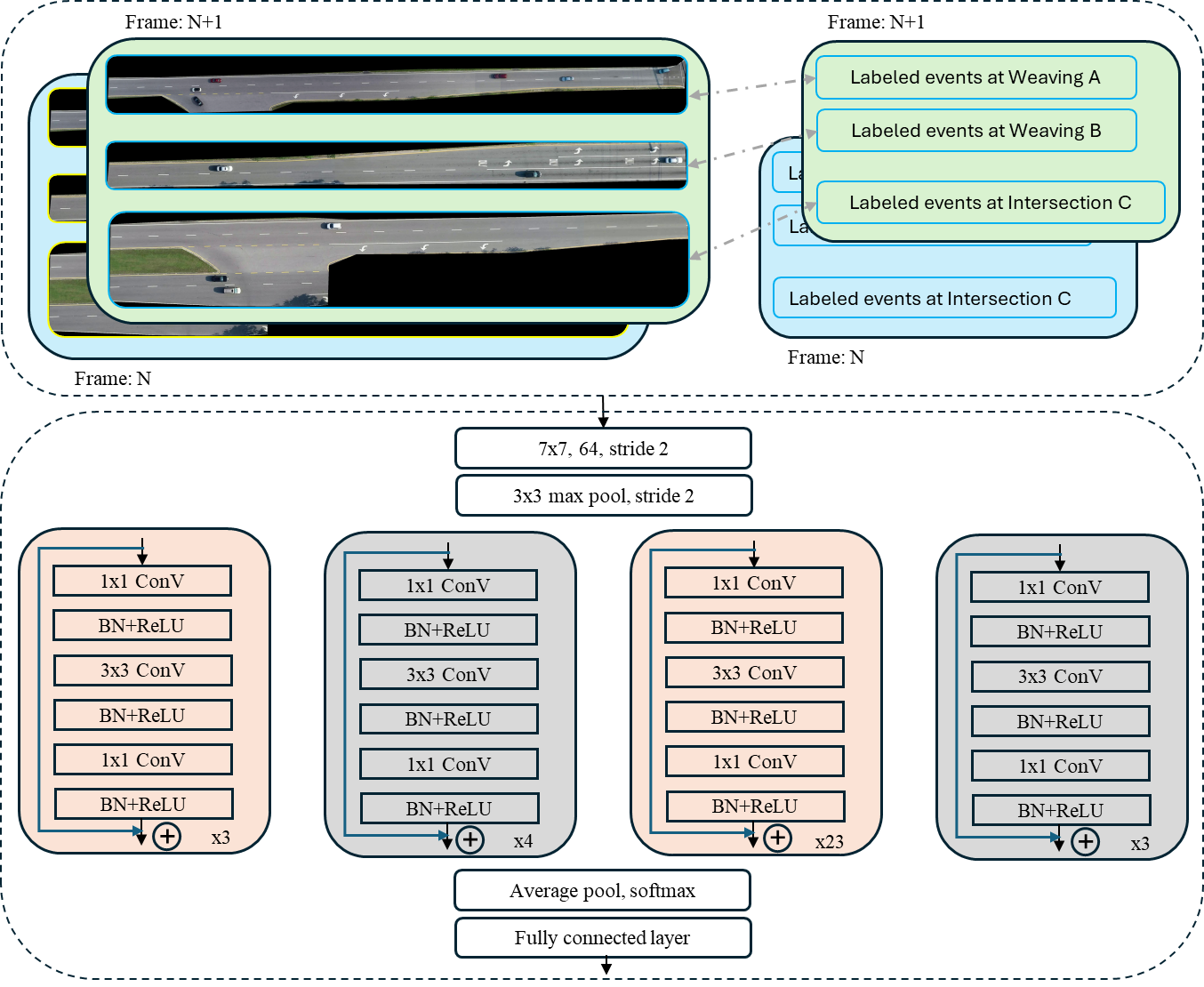
领导跨职能团队开发自动驾驶预碰撞场景和决策制定: Led a cross-function team to develop AV pre-crash scenarios and decision-making: IV. 设计K-medoids聚类流程从自然驾驶数据集中提取高风险预碰撞场景,改善自动驾驶安全验证的场景多样性;4. Designed K-medoids clustering pipelines to extract high-risk pre-crash scenarios from naturalistic driving datasets, improving scenario diversity for AV safety validation; V. 领导团队努力开发马尔可夫模型,用于交叉口级别碰撞可能性的概率预测,实现主动的自动驾驶安全决策制定。5. Led team efforts to develop Markov Models for probabilistic forecasting of intersection-level collision likelihood for proactive AV safety decision-making.